Grundfunktion eines Port-Pins
An den Port-Pins eines µC werden Taster und LED angeschlossen. Der µC soll die Funktion logischer Digital-Schaltungen simulieren. In der C-Umgebung kann nur auf die Gesammtheit aller Port-Bits zugegriffen werden, daher spielt das geschickte Bit-Maskieren hier eine grosse Rolle.
Vordefinierte Konstanten in den Include-Dateien
 Da sich die Adressen der Port-Register der verwendeten µC unterscheiden können und zur besseren Lesbarkeit des Quellcodes sind in den Include-Dateien des jeweiligen Kontrollers für jedes Register und jedes Bit entsprechende Bezeichnungen vordefiniert. Beispiel:
Da sich die Adressen der Port-Register der verwendeten µC unterscheiden können und zur besseren Lesbarkeit des Quellcodes sind in den Include-Dateien des jeweiligen Kontrollers für jedes Register und jedes Bit entsprechende Bezeichnungen vordefiniert. Beispiel:
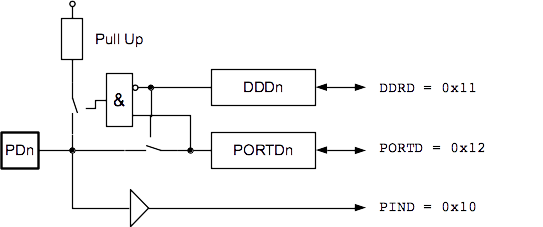
- PINB ist die Adresse, mit denen die Tri-State-Bausteine der Pins des Port B auf den Datenbus geschaltet werden
- DDRB ist die Adresse des Data Direction Registers B, mit dem ein Port-Pin als Ausgang programiert wird
- PORTB ist die Adresse des Port Registers B
- PB0..PB7 sind die Bezeichnungen der Port-Pins des Port B. Bei Verwendung dieser Bezeichner im Programm werden die Bitnummern der Anschlüsse PB0..PB7 im Port B zurück gegeben, PB0 hat den Wert 0, PB7 den Wert 7
- 1<<PB2 statt 0b100 verwenden für eine bessere Dokumentation im Quelltext. PB2 hat den Wert 2. Der Shift-Operator << verschiebt dadurch die 1 um zwei Stellen nach links, der Wert des Ausdrucks ist 0b100.
Priorität der Operatoren beachten
Siehe Ausdrücke und Operatoren. Bindungsstärke der Operatoren nimmt ab: ==,!= > & > ^ > | > && > ||
Beispiel für typischen Fehler: (PINB&3==3) wird so berechnet: (PINB&(3==3)) ergibt PINB&1. Daher Klammern setzen ((PINB&3)==3).
Boolsche Interpretation von nicht boolschen Ausdrücken in C
In C werden die Werte 0, 0.0, null als false interpretiert, alle anderen Werte, auch negative, als true.
Beispiel: Bei if ((PINB&3)!=0) kann C der Vergleich !=0 weg gelassen werden, if (PINB&3) führt zum selben Ergebnis.
Grundprinzip
Im ersten Lösungsquelltext ist eine Initalisierung (enspricht bei Arduino dem setup) und die Endlos-whileschleife (loop) enthalten, die weiteren Quelltexte enthalten nur noch den Inhalt der While-Scheife. Auch wurden Alternativen in der Darstellung der Werte vorgeschlagen: 0b00001000 = 8 = 0x08 = 1<<3
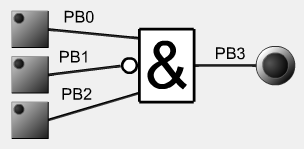
Und Baustein
#include <avr/io.h> // Einbinden der Konstanten
int main(){ // Hauptprogramm
DDRB = 0b00001000; // PB3 auf Ausgang
//DDRB = 1<<PB3;
while (1){ // Endlosschleife
if((PINB&3)==3){ // PB0 & PB1
PORTB |= 8; // PB3 <- 1
//PORTB |= 0b00001000;
//PORTB |= 1<<PB3;
}
else{
PORTB &= ~8; // PB3 <- 0
//PORTB &= 0b11110111;
//PORTB &= ~(1<<PB3);
}
}
}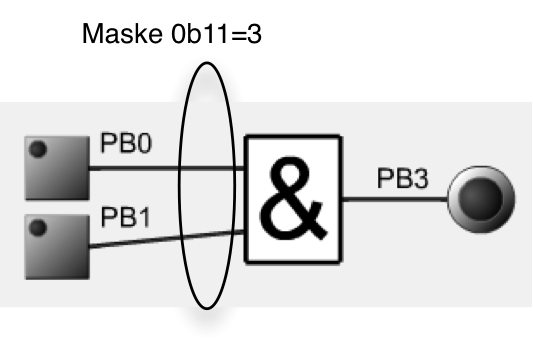 Lesen von PINB spricht alle Bits von PB an. Bei der Verarbeitung sind aber nur PB1 und PB0 relevant, die anderen Bits sollen ausgeblendet werden. Dies wird durch eine Und-Verknüpfung mit einer Maske erreicht, die alle unbeteiligten Bits ausblendet.
Lesen von PINB spricht alle Bits von PB an. Bei der Verarbeitung sind aber nur PB1 und PB0 relevant, die anderen Bits sollen ausgeblendet werden. Dies wird durch eine Und-Verknüpfung mit einer Maske erreicht, die alle unbeteiligten Bits ausblendet.
Maske: PINB & 0b11
Nach der Maskierung kann der Wert zwischen 0..3 liegen, der Und-Bausten soll beim Wert 3 eine 1 ausgeben, d.h. PB3 gesetzt werden sonst soll PB3 gelöscht werden.
Setzen von PB3: PORTB |= 1<<PB3; // 0b00001000
Löschen von PB3: PORTB &= ~(1<<PB3); // 0b11110111
SPS-Simulation mit Java
Für Schaltnetzsimulation zur Ausgabe von allen Kombinationen Vorher und Nachher:
Beachte: In Java werden Zahlenwerte nicht als boolsche Werte aktzeptiert, daher umschreiben, z.B. (PINB&1) zu ((PINB&1)!=0)
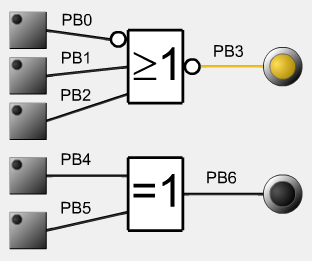
Oder Baustein
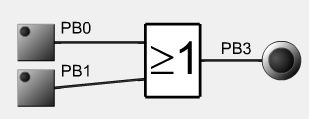
if((PINB&3)!=0){ // PB0 | PB1 PORTB |=8; // PB3 <- 1 } else{ PORTB &=~8; // PB3 <- 0 }
Zuerst die Maske bilden und dann mit dem Wert vergleichen,
bei dem das Oder nicht Eins sein soll.
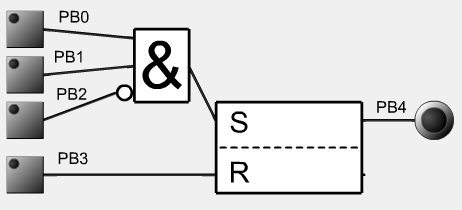
SR-FlipFlop
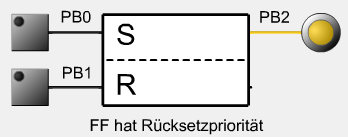
if(PINB&2){ // PB1 = 1 ? PORTB &=~4; // PB2 <- 0 } else if(PINB&1){ // PB0 = 1 ? PORTB |=4; // PB2 <- 1 }
Wegen der Rücksetzpriorität wird zuerst das R-Signal überprüft.
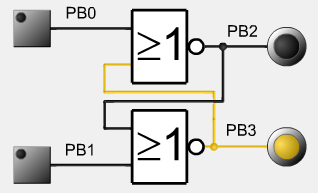
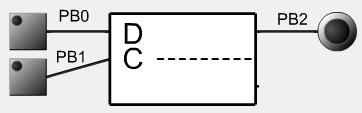
Taktflanken gesteuertes D-FF
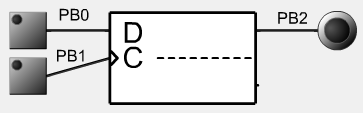
byte merker=0; // merkerbyte if(!merker && (PINB&2)){//PB1 st. Fl. if(PINB&1){ // PB2 <- PB0 PORTB |=4; } else { PORTB &=~4; } } merker = PINB&2;
Im der Variablen merker wird der letzte Zustand des PB1
gemerkt,
um die steigende Flanke erkennen zu können.