Auf dem STK200 sind Fassungen für verschiedene Mikrocontroller (µC), Taster und LED. Im Schaltplan links sind zwecks Übersichtlichkeit nur jeweils 4 Taster und LED dargestellt.
Bei der Grundfunktion als einfache I/O-Schnittstelle werden 8 Anschlüsse als eine I/O-Port-Einheit zusammengefasst.
An PORTD sind 8 Taster mit GND (0V) verbunden. Wenn ein Taster gedrückt wird wird der jeweilige Pin PD7..PD0 auf Masse (0V) gezogen. Hinweis: Port-Pin PD7 ist beim ATtiny2313 nicht vorhanden.
An PORTB sind 8 Leuchtdioden (LED) über jeweils einen Widerstand gegen VCC (5V) angeschlossen. Sie leuchten wenn der jeweilige Pin PB7..PB0 eine logische Null (0V) führt.
Grundfunktion der µC-Pins: I/0 Ports
/* Input Pins, Port D PIND[6:0] */
#define PIND _SFR_IO8(0x10)
#define PIND6 6
...
#define PIND0 0
/* Data Direction Register, Port D DDRD[6:0] */
#define DDRD _SFR_IO8(0x11)
#define DDD6 6
...
#define DDD0 0
/* Data Register, Port D PORTD[6:0] */
#define PORTD _SFR_IO8(0x12)
#define PD6 6
...
#define PD0 0
/* Copyright (c) 2004, 2005, 2006 Bob Paddock
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
* Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
* Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in
the documentation and/or other materials provided with the
distribution.
* Neither the name of the copyright holders nor the names of
contributors may be used to endorse or promote products derived
from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
POSSIBILITY OF SUCH DAMAGE. *//* $Id: iotn2313.h,v 1.14.2.8 2009/02/11 18:44:42 arcanum Exp $ *//* iotn2313.h derived from io2313.h by Bob Paddock.
The changes between the AT90S2313 and the ATtiny2313 are extensive.
Atmel has renamed several registers, and bits. See Atmel application note
AVR091, as well as the errata at the end of the current ATtiny2313 data
sheet. Some of the names have changed more than once during the sampling
period of the ATtiny2313.
Where there is no conflict the new and old names are both supported.
In the case of a new feature in a register, only the new name is used.
This intentionally breaks old code, so that there are no silent bugs. The
source code must be updated to the new name in this case.
The hardware interrupt vector table has changed from that of the AT90S2313.
ATtiny2313 programs in page mode rather than the byte mode of the
AT90S2313. Beware of programming the ATtiny2313 as a AT90S2313 device,
when programming the Flash.
ATtiny2313 has Signature Bytes: 0x1E 0x91 0x0A.
Changes and/or additions are noted by "ATtiny" in the comments below. *//* avr/iotn2313.h - definitions for ATtiny2313 */#ifndef _AVR_IOTN2313_H_#define _AVR_IOTN2313_H_ 1/* This file should only be included from <avr/io.h>, never directly. */#ifndef _AVR_IO_H_# error "Include <avr/io.h> instead of this file."#endif#ifndef _AVR_IOXXX_H_# define _AVR_IOXXX_H_ "iotn2313.h"#else# error "Attempt to include more than one <avr/ioXXX.h> file."#endif/* I/O registers *//*
* The Register Bit names are represented by their bit number (0-7).
* Example: PORTB |= _BV(PORTB7); Set MSB of PORTB.
*//* 0x00 Reserved *//* ATtiny Digital Input Disable Register DIDR */#define DIDR _SFR_IO8(0x01)#define AIN1D 1#define AIN0D 0/* ATtiny USART Baud Rate Register High UBBRH[11:8] */#define UBRRH _SFR_IO8(0x02)/* ATtiny USART Control and Status Register C UCSRC */#define UCSRC _SFR_IO8(0x03)#define UMSEL 6#define UPM1 5#define UPM0 4#define USBS 3#define UCSZ1 2#define UCSZ0 1#define UCPOL 0/* 0x04 -> 0x07 Reserved *//* ATtiny Analog Comparator Control and Status Register ACSR */#define ACSR _SFR_IO8(0x08)#define ACD 7#define ACBG 6#define ACO 5#define ACI 4#define ACIE 3#define ACIC 2#define ACIS1 1#define ACIS0 0/* USART Baud Rate Register Low UBBRL[7:0] */#define UBRRL _SFR_IO8(0x09)/* ATtiny USART Control Register UCSRB */#define UCSRB _SFR_IO8(0x0A)#define RXCIE 7#define TXCIE 6#define UDRIE 5#define RXEN 4#define TXEN 3#define UCSZ2 2#define RXB8 1#define TXB8 0/* ATtiny USART Status Register UCSRA */#define UCSRA _SFR_IO8(0x0B)#define RXC 7#define TXC 6#define UDRE 5#define FE 4#define DOR 3#define UPE 2#define U2X 1#define MPCM 0/* USART I/O Data Register UBR or RXB[7:0], TXB[7:0] */#define UDR _SFR_IO8(0x0C)#define RXB _SFR_IO8(0x0C)#define TXB _SFR_IO8(0x0C)/* ATtiny USI Control Register USICR */#define USICR _SFR_IO8(0x0D)#define USISIE 7#define USIOIE 6#define USIWM1 5#define USIWM0 4#define USICS1 3#define USICS0 2#define USICLK 1#define USITC 0/* ATtiny USI Status Register USISR */#define USISR _SFR_IO8(0x0E)#define USISIF 7#define USIOIF 6#define USIPF 5#define USIDC 4#define USICNT3 3#define USICNT2 2#define USICNT1 1#define USICNT0 0/* ATtiny USI Data Register USIDR[7:0] */#define USIDR _SFR_IO8(0x0F)/* Input Pins, Port D PIND[6:0] */#define PIND _SFR_IO8(0x10)#define PIND6 6#define PIND5 5#define PIND4 4#define PIND3 3#define PIND2 2#define PIND1 1#define PIND0 0/* Data Direction Register, Port D DDRD[6:0] */#define DDRD _SFR_IO8(0x11)#define DDD6 6#define DDD5 5#define DDD4 4#define DDD3 3#define DDD2 2#define DDD1 1#define DDD0 0/* Data Register, Port D PORTD[6:0] */#define PORTD _SFR_IO8(0x12)#define PD6 6#define PD5 5#define PD4 4#define PD3 3#define PD2 2#define PD1 1#define PD0 0/* ATtiny General Purpose I/O Register Zero GPIOR0[7:0] */#define GPIOR0 _SFR_IO8(0x13)/* ATtiny General Purpose I/O Register One GPIOR1[7:0] */#define GPIOR1 _SFR_IO8(0x14)/* ATtiny General Purpose I/O Register Two One GPIOR2[7:0] */#define GPIOR2 _SFR_IO8(0x15)/* Input Pins, Port B PORTB[7:0] */#define PINB _SFR_IO8(0x16)#define PINB7 7#define PINB6 6#define PINB5 5#define PINB4 4#define PINB3 3#define PINB2 2#define PINB1 1#define PINB0 0/* Data Direction Register, Port B PORTB[7:0] */#define DDRB _SFR_IO8(0x17)#define DDB7 7#define DDB6 6#define DDB5 5#define DDB4 4#define DDB3 3#define DDB2 2#define DDB1 1#define DDB0 0/* Data Register, Port B PORTB[7:0] */#define PORTB _SFR_IO8(0x18)#define PB7 7#define PB6 6#define PB5 5#define PB4 4#define PB3 3#define PB2 2#define PB1 1#define PB0 0/* Port A Input Pins Address PINA[2:0] */#define PINA _SFR_IO8(0x19)#define PINA2 2#define PINA1 1#define PINA0 0/* Port A Data Direction Register DDRA[2:0] */#define DDRA _SFR_IO8(0x1A)#define DDRA2 2#define DDRA1 1#define DDRA0 0/* Port A Data Register PORTA[2:0] */#define PORTA _SFR_IO8(0x1B)#define PA2 2#define PA1 1#define PA0 0/* ATtiny EEPROM Control Register EECR */#define EECR _SFR_IO8(0x1C)#define EEPM1 5#define EEPM0 4#define EERIE 3#define EEMPE 2#define EEPE 1#define EERE 0/* EEPROM Data Register */#define EEDR _SFR_IO8(0x1D)/* The EEPROM Address Register EEAR[6:0] */#define EEAR _SFR_IO8(0x1E)#define EEARL _SFR_IO8(0x1E)#define EEAR6 6#define EEAR5 5#define EEAR4 4#define EEAR3 3#define EEAR2 2#define EEAR1 1#define EEAR0 0/* 0x1F Reserved *//* ATtiny Pin Change Mask Register PCMSK PCINT[7:0] */#define PCMSK _SFR_IO8(0x20)#define PCINT7 7#define PCINT6 6#define PCINT5 5#define PCINT4 4#define PCINT3 3#define PCINT2 2#define PCINT1 1#define PCINT0 0/* ATtiny Watchdog Timer Control Register WDTCSR */#define WDTCSR _SFR_IO8(0x21)#define WDIF 7#define WDIE 6#define WDP3 5#define WDCE 4#define WDE 3#define WDP2 2#define WDP1 1#define WDP0 0/* ATtiny Timer/Counter1 Control Register C TCCR1C */#define TCCR1C _SFR_IO8(0x22)#define FOC1A 7#define FOC1B 6/* General Timer/Counter Control Register GTCCR */#define GTCCR _SFR_IO8(0x23)#define PSR10 0/* T/C 1 Input Capture Register ICR1[15:0] */#define ICR1 _SFR_IO16(0x24)#define ICR1L _SFR_IO8(0x24)#define ICR1H _SFR_IO8(0x25)/* ATtiny Clock Prescale Register */#define CLKPR _SFR_IO8(0x26)#define CLKPCE 7#define CLKPS3 3#define CLKPS2 2#define CLKPS1 1#define CLKPS0 0/* 0x27 Reserved *//* ATtiny Output Compare Register 1 B OCR1B[15:0] */#define OCR1B _SFR_IO16(0x28)#define OCR1BL _SFR_IO8(0x28)#define OCR1BH _SFR_IO8(0x29)/* Output Compare Register 1 OCR1A[15:0] */#define OCR1 _SFR_IO16(0x2A)#define OCR1L _SFR_IO8(0x2A)#define OCR1H _SFR_IO8(0x2B)#define OCR1A _SFR_IO16(0x2A)#define OCR1AL _SFR_IO8(0x2A)#define OCR1AH _SFR_IO8(0x2B)/* Timer/Counter 1 TCNT1[15:0] */#define TCNT1 _SFR_IO16(0x2C)#define TCNT1L _SFR_IO8(0x2C)#define TCNT1H _SFR_IO8(0x2D)/* ATtiny Timer/Counter 1 Control and Status Register TCCR1B */#define TCCR1B _SFR_IO8(0x2E)#define ICNC1 7#define ICES1 6#define WGM13 4#define WGM12 3 /* Was CTC1 in AT90S2313 */#define CS12 2#define CS11 1#define CS10 0/* ATtiny Timer/Counter 1 Control Register TCCR1A */#define TCCR1A _SFR_IO8(0x2F)#define COM1A1 7#define COM1A0 6#define COM1B1 5#define COM1B0 4#define WGM11 1 /* Was PWM11 in AT90S2313 */#define WGM10 0 /* Was PWM10 in AT90S2313 *//* ATtiny Timer/Counter Control Register A TCCR0A */#define TCCR0A _SFR_IO8(0x30)#define COM0A1 7#define COM0A0 6#define COM0B1 5#define COM0B0 4#define WGM01 1#define WGM00 0/* ATtiny Oscillator Calibration Register OSCCAL[6:0] */#define OSCCAL _SFR_IO8(0x31)#define CAL6 6#define CAL5 5#define CAL4 4#define CAL3 3#define CAL2 2#define CAL1 1#define CAL0 0/* Timer/Counter 0 TCNT0[7:0] */#define TCNT0 _SFR_IO8(0x32)/* ATtiny Timer/Counter 0 Control Register TCCR0B */#define TCCR0B _SFR_IO8(0x33)#define FOC0A 7#define FOC0B 6#define WGM02 3#define CS02 2#define CS01 1#define CS00 0/* ATtiny MCU Status Register MCUSR */#define MCUSR _SFR_IO8(0x34)#define WDRF 3#define BORF 2#define EXTRF 1#define PORF 0/* ATtiny MCU general Control Register MCUCR */#define MCUCR _SFR_IO8(0x35)#define PUD 7#define SM1 6#define SE 5#define SM0 4 /* Some preliminary ATtiny2313 data sheets incorrectly refer
to this bit as SMD; was SM in AT90S2313. */#define ISC11 3#define ISC10 2#define ISC01 1#define ISC00 0/* ATtiny Output Compare Register A OCR0A[7:0] */#define OCR0A _SFR_IO8(0x36)/* ATtiny Store Program Memory Control and Status Register SPMCSR */#define SPMCSR _SFR_IO8(0x37)#define CTPB 4#define RFLB 3#define PGWRT 2#define PGERS 1#define SPMEN 0 /* The name is used in ATtiny2313.xml file. */#define SELFPRGEN 0 /* The name is used in datasheet. */#define SELFPRGE 0 /* The name is left for compatibility. *//* ATtiny Timer/Counter Interrupt Flag register TIFR */#define TIFR _SFR_IO8(0x38)#define TOV1 7#define OCF1A 6#define OCF1B 5#define ICF1 3#define OCF0B 2#define TOV0 1#define OCF0A 0/* ATtiny Timer/Counter Interrupt MaSK register TIMSK */#define TIMSK _SFR_IO8(0x39)#define TOIE1 7#define OCIE1A 6#define OCIE1B 5#define ICIE1 3#define OCIE0B 2#define TOIE0 1#define OCIE0A 0/* ATtiny External Interrupt Flag Register EIFR, was GIFR */#define EIFR _SFR_IO8(0x3A)#define INTF1 7#define INTF0 6#define PCIF 5/* ATtiny General Interrupt MaSK register GIMSK */#define GIMSK _SFR_IO8(0x3B)#define INT1 7#define INT0 6#define PCIE 5/* ATtiny Output Compare Register B OCR0B[7:0] */#define OCR0B _SFR_IO8(0x3C)/* Interrupt vectors: *//* External Interrupt Request 0 */#define INT0_vect _VECTOR(1)#define SIG_INTERRUPT0 _VECTOR(1)#define SIG_INT0 _VECTOR(1)/* External Interrupt Request 1 */#define INT1_vect _VECTOR(2)#define SIG_INTERRUPT1 _VECTOR(2)#define SIG_INT1 _VECTOR(2)/* Timer/Counter1 Capture Event */#define TIMER1_CAPT_vect _VECTOR(3)#define SIG_INPUT_CAPTURE1 _VECTOR(3)#define SIG_TIMER1_CAPT _VECTOR(3)/* Timer/Counter1 Compare Match A */#define TIMER1_COMPA_vect _VECTOR(4)#define SIG_OUTPUT_COMPARE1A _VECTOR(4)#define SIG_TIMER1_COMPA _VECTOR(4)/* Timer/Counter1 Overflow */#define TIMER1_OVF_vect _VECTOR(5)#define SIG_OVERFLOW1 _VECTOR(5)#define SIG_TIMER1_OVF _VECTOR(5)/* Timer/Counter0 Overflow */#define TIMER0_OVF_vect _VECTOR(6)#define SIG_OVERFLOW0 _VECTOR(6)#define SIG_TIMER0_OVF _VECTOR(6)/* USART, Rx Complete */#define USART_RX_vect _VECTOR(7)#define SIG_USART0_RECV _VECTOR(7)#define SIG_USART0_RX _VECTOR(7)/* USART Data Register Empty */#define USART_UDRE_vect _VECTOR(8)#define SIG_USART0_DATA _VECTOR(8)#define SIG_USART0_UDRE _VECTOR(8)/* USART, Tx Complete */#define USART_TX_vect _VECTOR(9)#define SIG_USART0_TRANS _VECTOR(9)#define SIG_USART0_TX _VECTOR(9)/* Analog Comparator */#define ANA_COMP_vect _VECTOR(10)#define SIG_COMPARATOR _VECTOR(10)#define SIG_ANALOG_COMP _VECTOR(10)#define PCINT_vect _VECTOR(11)#define SIG_PIN_CHANGE _VECTOR(11)#define SIG_PCINT _VECTOR(11)#define TIMER1_COMPB_vect _VECTOR(12)#define SIG_OUTPUT_COMPARE1B _VECTOR(12)#define SIG_TIMER1_COMPB _VECTOR(12)#define TIMER0_COMPA_vect _VECTOR(13)#define SIG_OUTPUT_COMPARE0A _VECTOR(13)#define SIG_TIMER0_COMPA _VECTOR(13)#define TIMER0_COMPB_vect _VECTOR(14)#define SIG_OUTPUT_COMPARE0B _VECTOR(14)#define SIG_TIMER0_COMPB _VECTOR(14)/* USI Start Condition */#define USI_START_vect _VECTOR(15)#define SIG_USI_START _VECTOR(15)#define SIG_USI_START _VECTOR(15)/* USI Overflow */#define USI_OVERFLOW_vect _VECTOR(16)#define SIG_USI_OVERFLOW _VECTOR(16)#define SIG_USI_OVERFLOW _VECTOR(16)#define EEPROM_READY_vect _VECTOR(17)#define SIG_EEPROM_READY _VECTOR(17)#define SIG_EE_READY _VECTOR(17)/* Watchdog Timer Overflow */#define WDT_OVERFLOW_vect _VECTOR(18)#define SIG_WATCHDOG_TIMEOUT _VECTOR(18)#define SIG_WDT_OVERFLOW _VECTOR(18)/* 38 = (18*2)+2: Number of vectors times two, plus the reset vector */#define _VECTORS_SIZE 38/* Constants */#define SPM_PAGESIZE 32#define RAMEND 0xDF#define XRAMEND RAMEND#define E2END 0x7F#define E2PAGESIZE 4#define FLASHEND 0x07FF/* Fuses */#define FUSE_MEMORY_SIZE 3/* Low Fuse Byte */#define FUSE_CKSEL0 (unsigned char)~_BV(0)#define FUSE_CKSEL1 (unsigned char)~_BV(1)#define FUSE_CKSEL2 (unsigned char)~_BV(2)#define FUSE_CKSEL3 (unsigned char)~_BV(3)#define FUSE_SUT0 (unsigned char)~_BV(4)#define FUSE_SUT1 (unsigned char)~_BV(5)#define FUSE_CKOUT (unsigned char)~_BV(6)#define FUSE_CKDIV8 (unsigned char)~_BV(7)#define LFUSE_DEFAULT (FUSE_CKSEL0 & FUSE_CKSEL1 & FUSE_CKSEL3 & FUSE_SUT0 & FUSE_CKDIV8)/* High Fuse Byte */#define FUSE_RSTDISBL (unsigned char)~_BV(0)#define FUSE_BODLEVEL0 (unsigned char)~_BV(1)#define FUSE_BODLEVEL1 (unsigned char)~_BV(2)#define FUSE_BODLEVEL2 (unsigned char)~_BV(3)#define FUSE_WDTON (unsigned char)~_BV(4)#define FUSE_SPIEN (unsigned char)~_BV(5)#define FUSE_EESAVE (unsigned char)~_BV(6)#define FUSE_DWEN (unsigned char)~_BV(7)#define HFUSE_DEFAULT (FUSE_SPIEN)/* Extended Fuse Byte */#define FUSE_SELFPRGEN (unsigned char)~_BV(0)#define EFUSE_DEFAULT (0xFF)/* Lock Bits */#define __LOCK_BITS_EXIST/* Signature */#define SIGNATURE_0 0x1E#define SIGNATURE_1 0x91#define SIGNATURE_2 0x0A#endif /* _AVR_IOTN2313_H_ */
Einlesen aller Taster und Ausgeben auf LED
#include <avr/io.h> // Einbinden der Konstanten
int main(){ // Hauptprogramm
PORTD = 0xFF; // PullUps an
PORTB = 0xFF; // LED aus (neg. Logik)
DDRB = 0xFF; // PB7..PB0 als Ausgang
while(1){ // Endlosschleife
PORTB = PIND; // Taster lesen und ausgeben
}
}
C-Quellcode
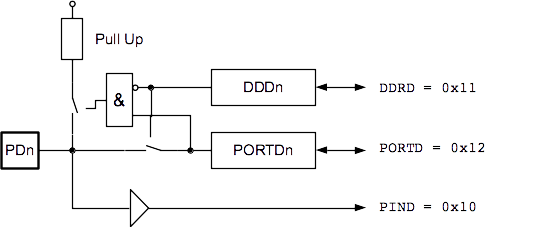
Die Grundfunktion der Anschlüsse (Pins) ist die Verwendung als I/O-Schnittstelle. Hier am Beispiel von Port D:
Einzelnes Port-Pin von PortD, n ist Pin-Nummer (6..0)
8 Pins werden jeweils zu einem I/O-Port zusammengefasst und als Einheit angesprochen.
(Ausnahme: PORTD beim ATtiny2313 hat nur 7 Pins)
Die binären Signal-Zustände der Pins PD6..PD0 können mit einem lesenden Zugriff auf Adresse 0x10 abgefragt werden. Ein Tri-State-Baustein schaltet dabei die Signale auf den Datenbus durch.
Um die Handhabung zu vereinfachen und zwecks besserem Verständnis des Programmcodes wurden für die Adressen und Pin-Nummern Konstanten definiert, siehe Codeauszug rechts.
Für die Verwendung als Ausgang sind bei jedem Pin zwei Flip-Flops vorhanden, eines für das Einschalten der Ausgangsfunktion (DDDn) und eines für den auszugebenden Wert (PORTDn).
Bei Verwendung als Eingang wäre PORTDn arbeitslos und bekam als sinnvolle Aufgabe die Kontrolle über einen zuschaltbaren PullUp-Widerstand.
Bsp. Funktion LED1 = S1 und S2 soll gelöst werden. Um Verwirrung und Fehler zu vermeiden kann es sinnvoll sein, die Aufgabenstellung in positive Logik zu übersetzen:
LED1 = !PB0; S1 = !PD0; S2 = !PD1
!PB0 = !PD0 und !PD1 <DeMorgan> PB0 = PD0 oder PD1 <- das programmieren
Aufgaben
Erstellen Sie Quellcode, der PB7..PB0 als Ausgang schaltet und LED 2 leuchten lässt.
#include <avr/io.h> // Einbinden der Konstanten
int main(){ // Hauptprogramm
PORTB = 0b11111101; // LED2 an (neg. Logik)
DDRB = 0xFF; // PB7..PB0 als Ausgang
while(1){ // Endlosschleife
}
}
Erstellen Sie Quellcode, der bei PD3..PD0 die PullUp-Widerstände einschaltet und LED 8 leuchten lässt.
#include <avr/io.h> // Einbinden der Konstanten
int main(){ // Hauptprogramm
PORTD = 0x0F; // PullUps an
PORTB = 0x7F; // LED8 an (neg. Logik)
DDRB = 0xFF; // PB7..PB0 als Ausgang
while(1){ // Endlosschleife
}
}
Erstellen Sie Quellcode, der alle LED leuchten lässt, wenn irgendeine Taste gedrückt wird.
#include <avr/io.h> // Einbinden der Konstanten
int main(){ // Hauptprogramm
PORTD = 0xFF; // PullUps an
PORTB = 0xFF; // LED aus (neg. Logik)
DDRB = 0xFF; // PB7..PB0 als Ausgang
while(1){ // Endlosschleife
if(PIND<127){ // PD7 ist bei 2313 immer 0
PORTB = 0; // Alle LED an
}
else{
PORTB = 0xFF // Alle LED aus
}
}
}