
Problemstellung
Mit dem STK200 (ATtiny2313 @ 1MHz) soll die Simulation einer Garagentorsteuerung erstellt werden:
| PD | 3 | 2 | 1 | 0 |
|---|---|---|---|---|
| Funktion | Handsender | Zu | Stopp | Auf |
| Beschreibung | Stopp-Auf-Stopp-Zu... | Tor schließen | NotStopp | Tor öffnen |
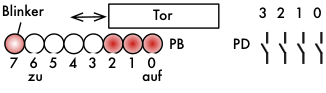
Das Tor wird mit einem Leuchtband LED6..LED0 an PB dargestellt. Bei Tor zu leuchten LED6..0, bei Tor offen leuchtet nur LED0.
LED7 blinkt beim Fahren des Tors. Beim Fahren wechselt die LED7 nach 150ms ihren Zustand. Nach 4 Zustandswechseln wird eine Leuchtbands-LED mehr oder weniger geschaltet, je nach Fahrrichtung.

An PD2 und PD0 ist ein Schlüsselschalter angeschlossen, mit dem das Tor geschlossen und geöffnet werden kann. Wird bei fahrendem Tor der Schalter in die Gegenrichtung betätigt stoppt das Tor, erst bei erneuter Betätigung läuft es in die Gegenrichtung.
An PD1 ist der NotStopp angeschlossen. Bei diesem Signal stoppt das Tor.
An PD3 ist ein Handsenderempfänger angeschlossen. Bei Betätigung wird ein fahrendes Tor gestoppt. Ein gestopptes Tor wird in die Gegenrichtung der vorherigen Fahrt gestartet.
Vorgaben (mittels Klassendiagramm)
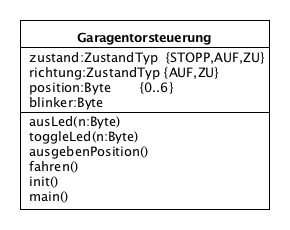 Zur Erleichterung einer systematischen Problemlösung sei gegeben:
Zur Erleichterung einer systematischen Problemlösung sei gegeben:
Eine globale Variable zustand, die die Zustände STOPP,AUF,ZU annehmen kann.
Eine globale Variabel richtung, die den Wert AUF oder ZU annehmen kann.
Eine globale Variable position, für die Position des Tors: 0=offen; 6=zu
Die globale Variable blinker soll beim Fahren alle 150ms um 1 erhöht werden.
Die Operation ausLed(n:Byte) schaltet die LED an PBn aus.
Die Operation toggleLed(n:Byte) ändert den Zustand an PBn.
Die Operation ausgebenPosition() gibt entsprechend der position das Leuchtband aus.
Die Operation fahren() erhöht den blinker, lässt die LED7 blinken und verändert bei jedem 4. Aufruf die Postion des Tors entsprechend der Richtung.
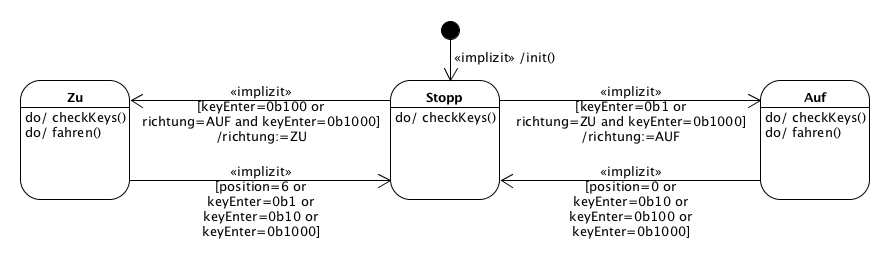
Zustandsdiagramm (mit Schülern entwickeln)
Aufzählungsdatentyp enum
Der Quellcode ist besser lesbar wenn statt Zahlen 0,1,2 für zustand aussagekräftige Namen vergeben werden. Mit dem Aufzählungsdatentyp enum ist dies möglich. Es kann sogar ein eigener wiederverwendbarer Datentyp mittels typedef definiert werden.
//enum {STOPP,AUF,ZU} zustand=STOPP,richtung=ZU; // Aufzaehlungstyp
typedef enum {STOPP,AUF,ZU} ZustandTyp; // Aufzaehlungstyp
ZustandTyp zustand;
ZustandTyp richtung;Quellcode
#ifndef CHECKKEYS_H_INCLUDETD // vermeide Doppeldeklarationen #define CHECKKEYS_H_INCLUDETD unsigned char keyEnter,keyExit; // gedr. und losg. Tasten void checkKeys(unsigned char keyMask,unsigned char keyNlogik); // Maske, neg.Logik #endif
#include <avr/io.h> // Definitionen laden #include <util/delay.h> // CPU Frequenz einstellen! #include "checkKeys.h" void checkKeys(unsigned char keyMask,unsigned char keyNlogik){ static unsigned char keyOld = 0; unsigned char keyTest,tmp; keyEnter = 0, keyExit = 0; keyTest = (PIND^keyNlogik)&keyMask; // Einlesen if (keyOld != keyTest){ // hat sich was getan _delay_ms(20); // Prellen abwarten tmp = (PIND^keyNlogik)&keyMask; // noch mal Einlesen if (tmp == keyTest){ // ist es stabil? keyEnter = (~keyOld) & keyTest; // steig. Fl. !alt&neu keyExit = keyOld & (~keyTest); // fall. Fl. alt&!neu keyOld = keyTest; } } }
Aufgabenstellungen
Ergänzen Sie den Quellcode für:
ausLed(unsigned char n) schaltet die LED an PBn aus.
toggleLed(unsigned char n) ändert den Zustand an PBn
ausgebenPosition() gibt entsprechend der position das Leuchtband aus
fahren(unsigned char n)
Erhöht den blinker, lässt die LED7 blinken und verändert bei jedem 4. Aufruf die Postion des Tors entsprechend der Richtung.