
Taster an µC anschließen
Typischerweise werden Taster mit einem PullUp Widerstand an den Eingang eines µC angeschlossen. Dabei fällt besonders bei Anwendungen, die Tastendrücke zählen sollen auf, dass bei einem Tastendruck oft mehr als ein Impuls erzeugt wird. Die Ursache ist das Tastenprellen, Kontaktprellen. Beim Schließen des Kontaktes wird die Verbindung noch mehrmals unterbrochen durch das Nachfedern der Kontake.
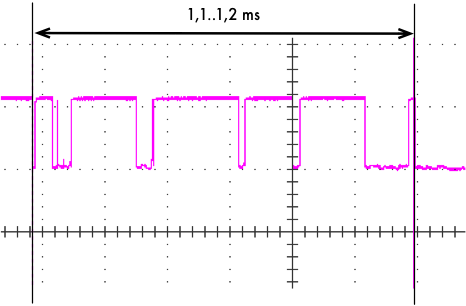
Nebenstehend ein Timingdiagramm für das Prellen eines Drehwellen-Schnappschalters der Firma Marquardt der im Münzprüfer eines Kunstautomaten verbaut wurde. Bei diesem Schalter ist das Prellen nach 1,2 ms vorbei und ein konstanter Pegel erreicht. Es gibt mehrere Lösungsansätze dem Prellen zu begegnen.
Hier sollen softwarebasierte Lösungen mit Warteschleifen vorgestellt werden.
Zähler für Tastendrücke
Ein Zähler soll die Tastendrücke auf PD0 zählen und binär auf PORTB ausgeben.
#include <avr/io.h> // Definitionen laden
#include <util/delay.h> // Delay-Bibliothek laden
int main(){ // Hauptprogramm
PORTB=0xe0; // alle LED aus
DDRB=0xff; // PB als Ausgang
PORTD=0x7f; // PullUps an
unsigned char zaehler = 0;
while(1){ // Endlosschleife
while(PIND&1<<PD4); // solange Taste nicht gedrueckt
// _delay_ms(10); // Prellen abwarten
zaehler++;
PORTB= 0xe0 | zaehler&0xf; // Ausgeben
while(!(PIND&1<<PD4)); // solange Taste gedrueckt
}
}
Um die Impulse durch das Prellen nicht mit zu zählen wird nach dem ersten Impuls so lange wartet, bis das Prellen vorbei ist. Dazu muss die Wartezeit warte1 länger als die Prellzeit des Tasters sein. Sollte der Taster beim Loslassen auch prellen muss dafür eine Wartezeit warte2 eingebaut werden. Versuchsweise können die Unterprogrammaufrufe _delay_ms() auskommentiert werden um die Auswirkung des Prellens zu studieren.
Abfrage, Maskierung und Entprellen mehrerer Tasten
#include <avr/io.h> // Definitionen laden #include <util/delay.h> // Delay-Bibliothek laden #define KEYREADER ~PIND >> 4 // Einlesen, invertieren, maskieren zurecht schieben unsigned char keyOld = 0; // alter Tasten-Zustand unsigned char keyEnter,keyExit; // gedrueckte und losgelassene Tasten void keyCheck(){ // Tastaturabfrage mit Flankendedektion unsigned char keyTest,tmp; keyEnter = 0, keyExit = 0; keyTest = KEYREADER; // Einlesen if (keyOld != keyTest){ // hat sich was getan _delay_ms(10); // Prellen abwarten tmp = KEYREADER; // noch mal Einlesen if (tmp == keyTest){ // ist es stabil? keyEnter = (~keyOld) & keyTest; // steigende Flanke !alt und neu keyExit = keyOld & (~keyTest); // fallende Flanke alt und !neu keyOld = keyTest; } } } int main(){ // Hauptprogramm PORTB=0xe0; // alle LED aus DDRB=0xff; // PB als Ausgang PORTD=0x7f; // PullUps an unsigned char zaehler = 0; while(1){ // Endlosschleife keyCheck(); // Tastatur abfragen if(keyEnter&1){ // wenn Taste0 gedrueckt zaehler++; PORTB= 0xe0 | zaehler&0xf; // Ausgeben } } }
Ein Unterprogramm für eine recht störresistente entprellte Tastaturabfrage. Neu gedürchte Tasten werden in keyenter und losgelassene Tasten in keyexit erfasst. Das Invertieren der Eingänge, Maskieren und Zurechtschieben kann mit KEYREADER eingestellt werden.
Gedanken zur Größe des PullUp-Widerstandes
Sei der µC in einem Fahrradtacho eingesetzt und der Schalter sei der Reedkontakt an der Gabel, der durch einen Magneten an einer Speiche geschlossen wird. Die Batterie sei eine LR2032 3V mit 40mAh Kapazität:
- Bei einem kleinen Widerstand z.B. R=100Ω fließt während der Schalter geschlossen ist ein nicht unbedeutender Querstrom: 3V/100Ω=30mA . Befindet sich der Magnet an der Speiche dauerhaft über dem Reedkontakt, ist mir schon beim Abstellen des Fahrrads schon passiert, wäre die Batterie in etwas über einer Stunde leer!
- Bei einem großen Widerstand z.B. R=1MΩ können elektrische Einstreuungen (z.B. durch Dynamo) in die Sensorleitung bei offenem Reedkontakt bereits zu Fehlsignalen führen.
- Typische Werte für PullUp Widerstände bei µC liegen in der Praxis zwischen 4,7kΩ-10kΩ.
Tyischer Einbau mit Header-Datei
[Include-Files (C)] Der C-konforme Ansatz mit Einbindung in das Projekt ist wesentlich komplizierter. In einer Header-Datei werden die im Hauptprogramm benötigten Variablen und Schnittstellen deklariert. In der .c-Datei wird der Quellcode definiert. Die Headerdatei wird ins Hauptprogramm und in die gleichnahmige Definitionsdatei eingebunden (mit #inlcude). Eine doppelte Deklaration (Fehlermeldung!) wird mit #ifndef vermieden.
#ifndef CHECKKEYS_H_INCLUDETD // vermeide Doppeldeklarationen #define CHECKKEYS_H_INCLUDETD #ifdef __cplusplus extern "C" { #endif unsigned char keyEnter,keyExit; // gedr. und losgel. Tasten void checkKeys(); // Maske, neg.Logik #ifdef __cplusplus } // extern "C" #endif #endif
#include <avr/io.h> // Definitionen laden #include <util/delay.h> // CPU Frequenz einstellen! #include "checkKeys.h" void checkKeys(){// Maske, neg.Logik static unsigned char keyOld = 0; unsigned char keyTest,tmp; keyEnter = 0, keyExit = 0; keyTest = ~PIND>>4; // Einlesen if (keyOld != keyTest){ // hat sich was getan _delay_ms(20); // Prellen abwarten tmp = ~PIND>>4;; // noch mal Einlesen if (tmp == keyTest){ // ist es stabil? keyEnter = (~keyOld) & keyTest; // steig. Fl. !alt & neu keyExit = keyOld & (~keyTest); // fall. Fl. alt & !neu keyOld = keyTest; } } }
#include <avr/io.h> // Definitionen laden #include <util/delay.h> // CPU Frequenz einstellen! #include "checkKeys.h" // Header einbinden int main(){ // Hauptprogramm PORTB=0xe0; // alle LED aus DDRB=0xff; // PB als Ausgang PORTD=0x7f; // PullUps an while(1){ // Endlosschleife checkKeys(); // Maske,NLogik if(keyEnter&1){ // Taste gedrueckt? PORTB^=1; // LED an PB0 invertieren } if(keyEnter&2){ // Taste gedrueckt? PORTB^=2; // LED an PB1 invertieren } } }
Arduino-Projekt: zEntprellen.zip
OOP Lösung
Der Compiler kann auch C++. Zunächst wird die Klasse deklariert. In der .cpp-Datei wird der Quellcode definiert. Im Hauptprogramm wird die Header-Datei eingebunden und ein KeyChecker-Objekt erzeugt.
class KeyChecker{ public: KeyChecker(); void checkKeys(); unsigned char getEnter(); unsigned char getExit(); private: unsigned char keyOld,keyEnter, keyExit; };
#include <avr/io.h> // Definitionen laden #include <util/delay.h> #include "KeyChecker.h" KeyChecker::KeyChecker(){} void KeyChecker::checkKeys(){ // Tastaturabfr. unsigned char keyTest,tmp; keyEnter = 0, keyExit = 0; keyTest = ~PIND>>4; // Einlesen if (keyOld != keyTest){ // hat sich was getan _delay_ms(20); // Prellen abwarten tmp = ~PIND>>4; // noch mal Einlesen if (tmp == keyTest){ // ist es stabil? keyEnter = (~keyOld) & keyTest; // steig. Fl. !alt und neu keyExit = keyOld & (~keyTest); // fall. Fl. alt und !neu keyOld = keyTest; } } } unsigned char KeyChecker::getEnter(){ return keyEnter; } unsigned char KeyChecker::getExit(){ return keyExit; }
#include <avr/io.h> // Definitionen laden #include <util/delay.h> // CPU Frequenz einstellen! #include "KeyChecker.h" // Header einbinden int main(){ // Hauptprogramm PORTB=0xe0; // alle LED aus DDRB=0xff; // PB als Ausgang PORTD=0x7f; // PullUps an KeyChecker kCheck = KeyChecker(); while(1){ // Endlosschleife kCheck.checkKeys(); // Tasten abfragen if(kCheck.getEnter()&1){ // Taste 0 gedrueckt? PINB=1; // LED an PB0 invertieren } if(kCheck.getEnter()&2){ // Taste 1 gedrueckt? PINB=2; // LED an PB1 invertieren } } }
Arduino-Projekt: zEntprellenOOP.zip
Leuchtpunkt mit Tasten wandern lassen
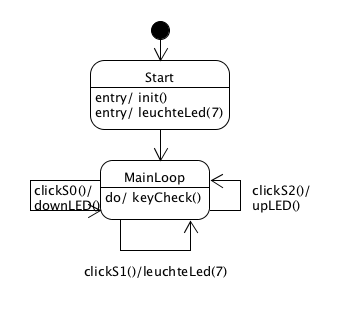
Erstellen Sie ein Progamm, das dieses Verhalten zeigt:
- Nach Reset oder Druck auf Taste T1 leuchtet L7
- Bei Druck auf Taste T0 bewegt sich der Leuchtpunkt um eine Led abwärts, bei L0 ist Schluss.
- Bei Druck auf Taste T2 bewegt sich der Leuchtpunkt um eine Led aufwärts, bei L15 ist Schluss.
Zum Entprellen der Tasten können Sie die Funktion keycheck() verwenden.